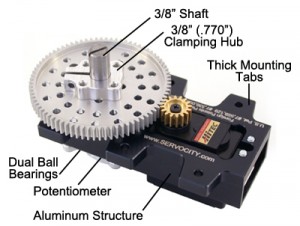
We have good news and bad news. Part one of the bad news is that our knee motor broke. Our knee system uses a worm gear and regular gear; as we mentioned in the last entry, the regular gear is made of plastic and got stripped. In the meantime, we’ve ordered replacement plastic gears so …